
Conception d'un système de réduction de bruit active par opposition de phase, combinant approches théoriques, expérimentales et électroniques. Le système est développé en trois étapes : expérimentation sur haut-parleurs, modélisation électrique et implémentation numérique sur Raspberry Pi.
Introduction
Le bruit est une vibration mécanique d’un fluide qui peut être mesurée en décibels (dB). Une exposition prolongée à un bruit excessif peut entraîner du stress, une perte de concentration et, à terme, des troubles auditifs. Il existe deux méthodes principales pour réduire le bruit :
- La réduction passive, qui repose sur l’absorption ou l’isolation acoustique via des matériaux spécifiques
- La réduction active, qui repose sur la génération d’un signal sonore en opposition de phase afin d’annuler une onde sonore indésirable
La réduction active est particulièrement utile pour atténuer certaines fréquences précises et compléter les limites de la réduction passive. Cependant, elle nécessite un système électronique performant capable d’analyser et de traiter les signaux sonores en temps réel.
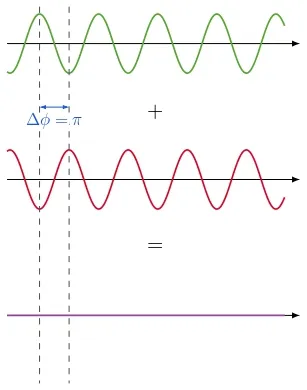
Figure 1 - Simulation d’opposition de phase
1. Premières expériences
a) Interférences destructives avec des Haut-Parleurs
La première expérimentation a consisté à générer une opposition de phase entre deux haut-parleurs pour créer une interférence destructive et réduire le bruit perçu.
- Deux haut-parleurs ont été disposés en face l’un de l’autre et alimentés par un générateur de signal avec un déphasage de 180°
- La réduction du bruit a été mesurée à différentes distances, et l’efficacité a atteint jusqu’à 93 % pour une fréquence de 440 Hz
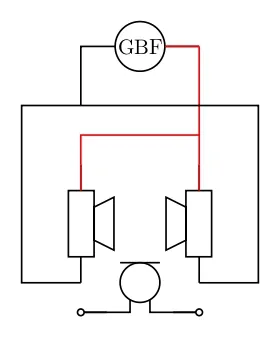
Figure 2 - Schéma du premier montage
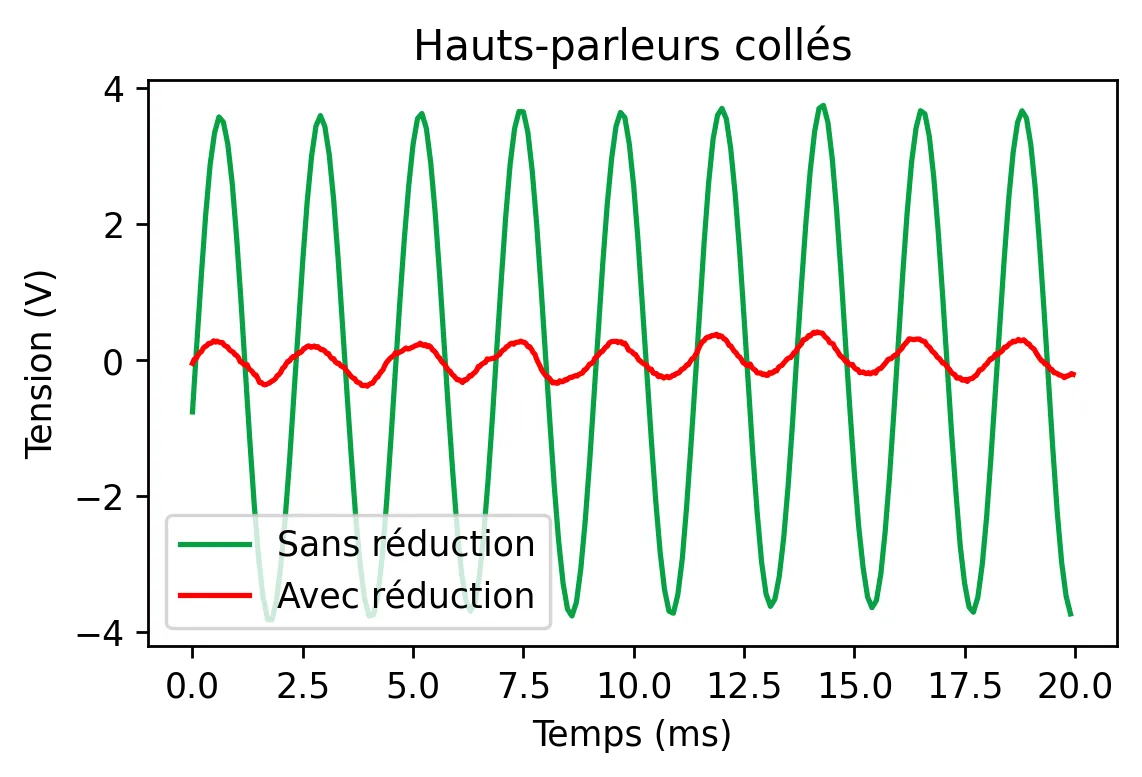
Figure 3 - Résultats associés : 93% d’efficacité
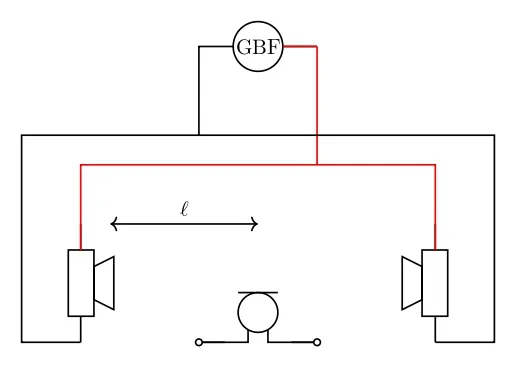
Figure 4 - Schéma du deuxième montage
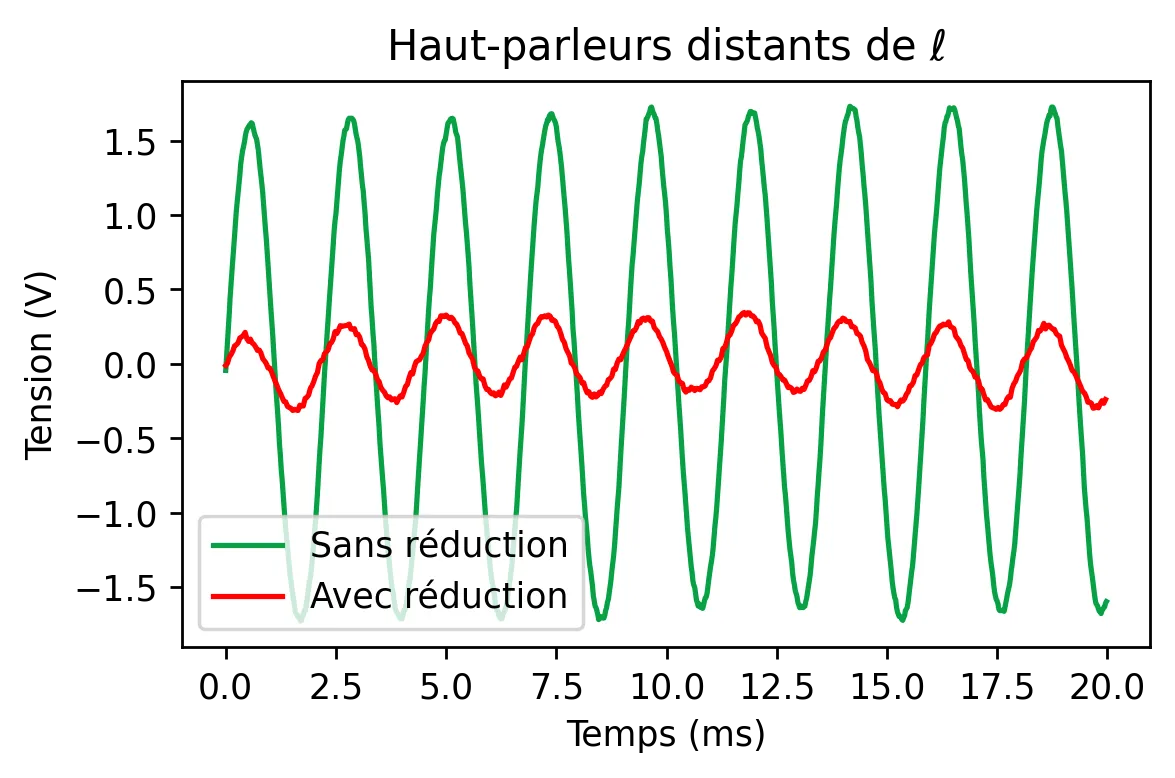
Figure 5 - Résultats associés : 86% d‘efficacité
L’expérience a donc révélé que le positionnement des haut-parleurs et les réflexions des ondes sonores influencent fortement l’efficacité de l’annulation.
L’expérimentation a mis en évidence plusieurs limitations :
- L’efficacité diminue fortement en présence de réflexions sonores sur les parois environnantes
- Une opposition de phase parfaite est difficile à maintenir sur l’ensemble du spectre sonore
- L’environnement de mesure doit être contrôlé pour limiter les interférences extérieures
Ces observations ont motivé la mise en place d’un système électrique plus précis permettant un meilleur contrôle du signal généré.
b) Première modélisation électrique
L’objectif était de concevoir un circuit capable de générer un signal déphasé en opposition de phase avec le bruit ambiant.
- Une tension sinusoïdale de 1 kHz est envoyée en entrée d’un circuit composé de résistances et de condensateurs pour produire un décalage de phase via la fonction
- Le signal obtenu a ensuite été additionné avec le bruit ambiant via un amplificateur sommateur, simulant ainsi une annulation du bruit par superposition d’ondes opposée
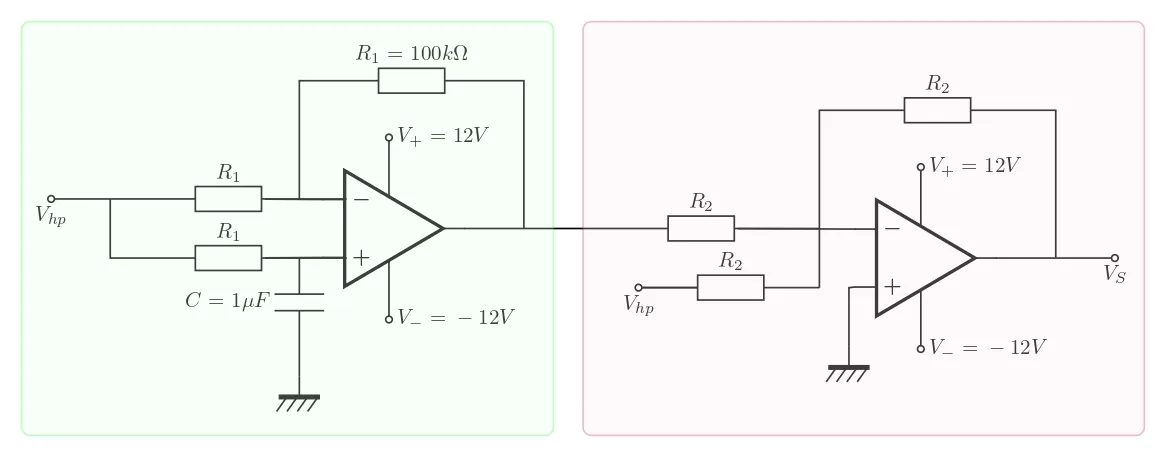
Figure 6 - Montage électrique du circuit déphaseur sommateur
Un premier circuit a été monté et testé :
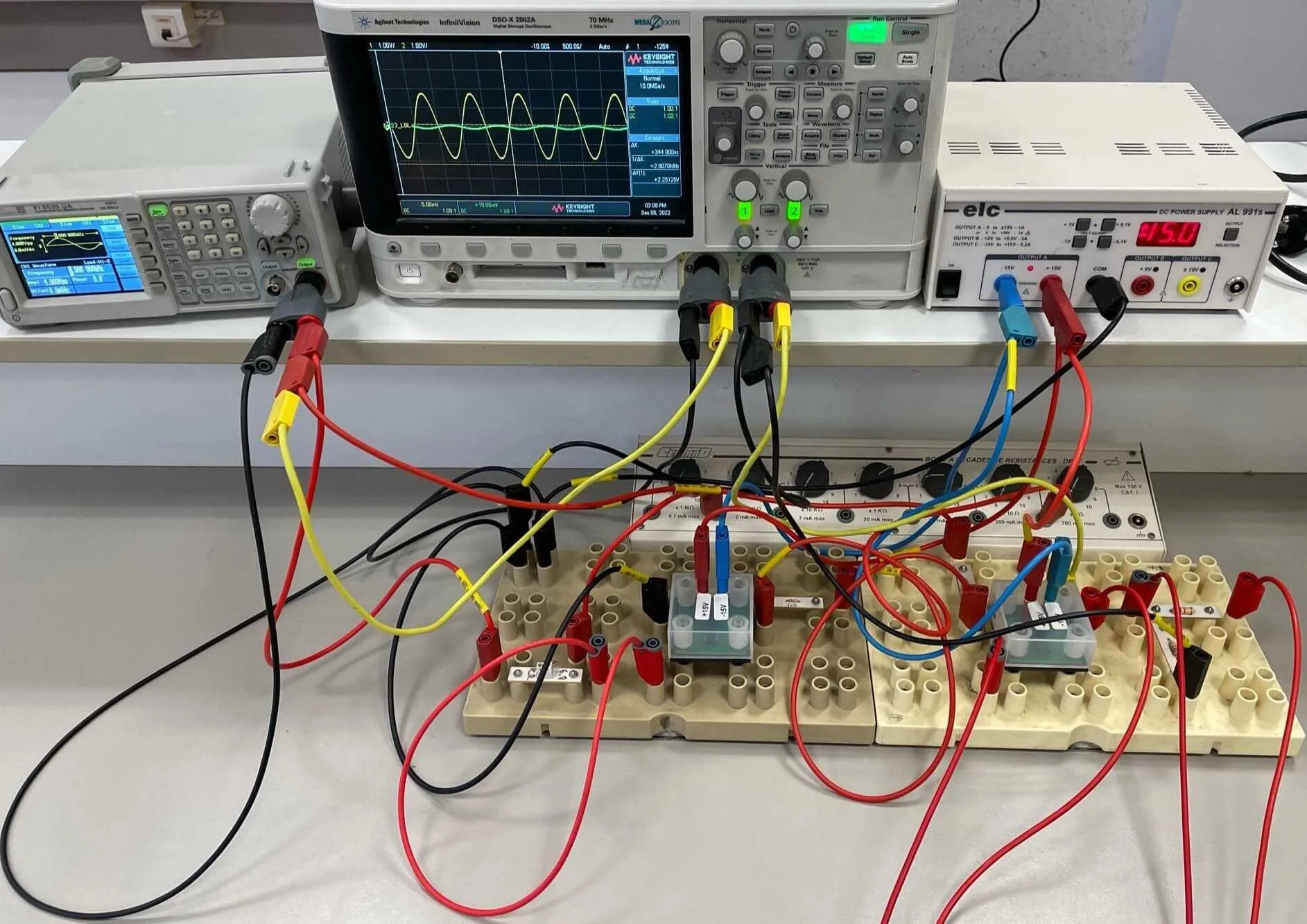
Figure 7 - Système électrique
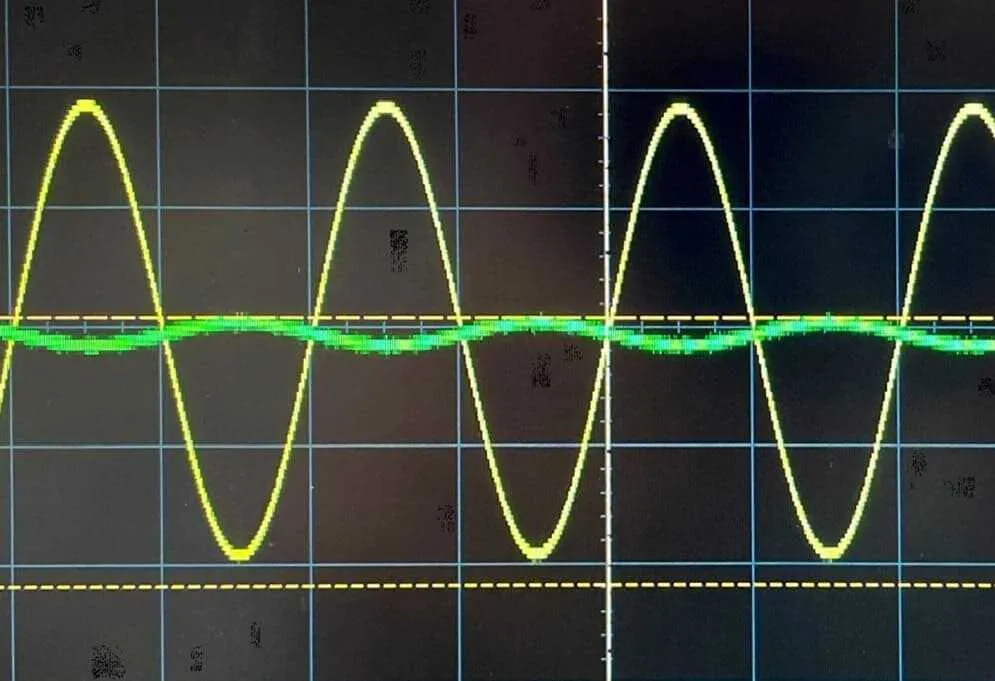
Figure 8 - Résultats associés mesurés
On peut mesurer que la réduction sonore mesurée a atteint 95 %, ce qui valide la faisabilité du modèle. Cependant, les valeurs des composants électroniques ont montré des incertitudes d’environ ±10 %, ce qui peut limiter la précision du déphasage obtenu et aussi expliquer l’écart de valeurs.
2. Système Électrique
Ce circuit a pour but de simuler une utilisation plus classique du principe de réduction de bruit active comme on peut le voir dans le commerce : l’annulation du bruit environnant pour ne garder que le son que l’on a choisi. Pour cela, nous traitons un signal d’entrée que nous sommons ensuite avec une musique.
Le bruit est donc la musique diffusée que nous essayons d’enlever au signal envoyé par le GBF.
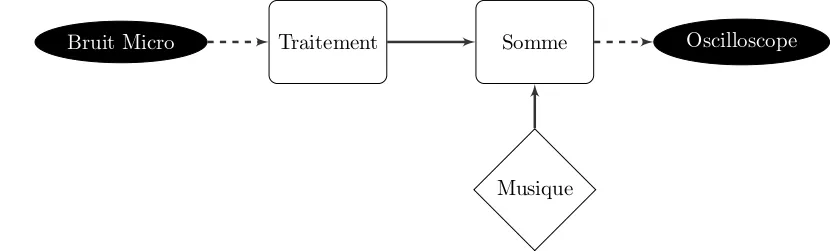
Figure 9 - Principe général du système
Nous avons alors monté et testé notre système :
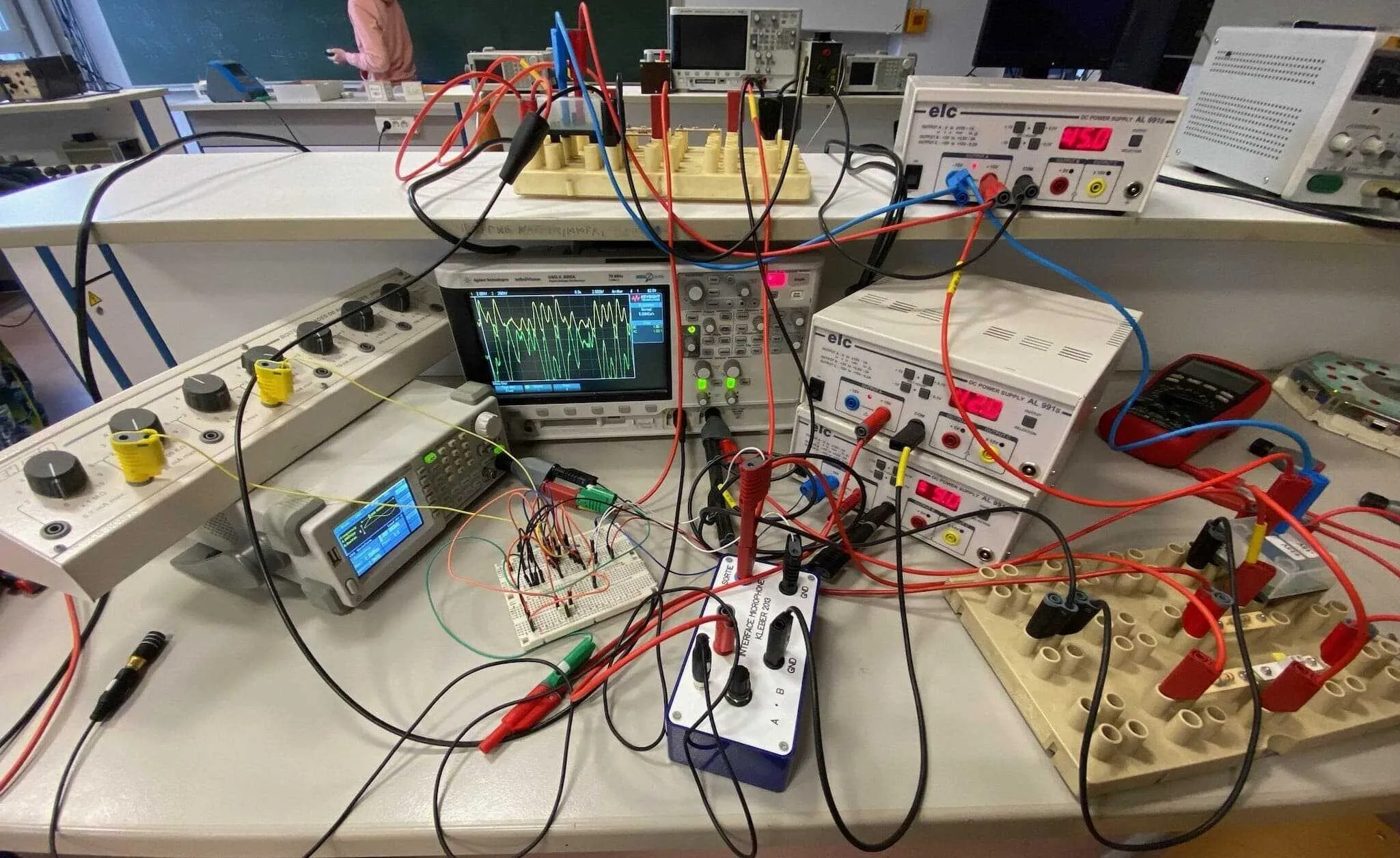
Figure 10 - Système électrique
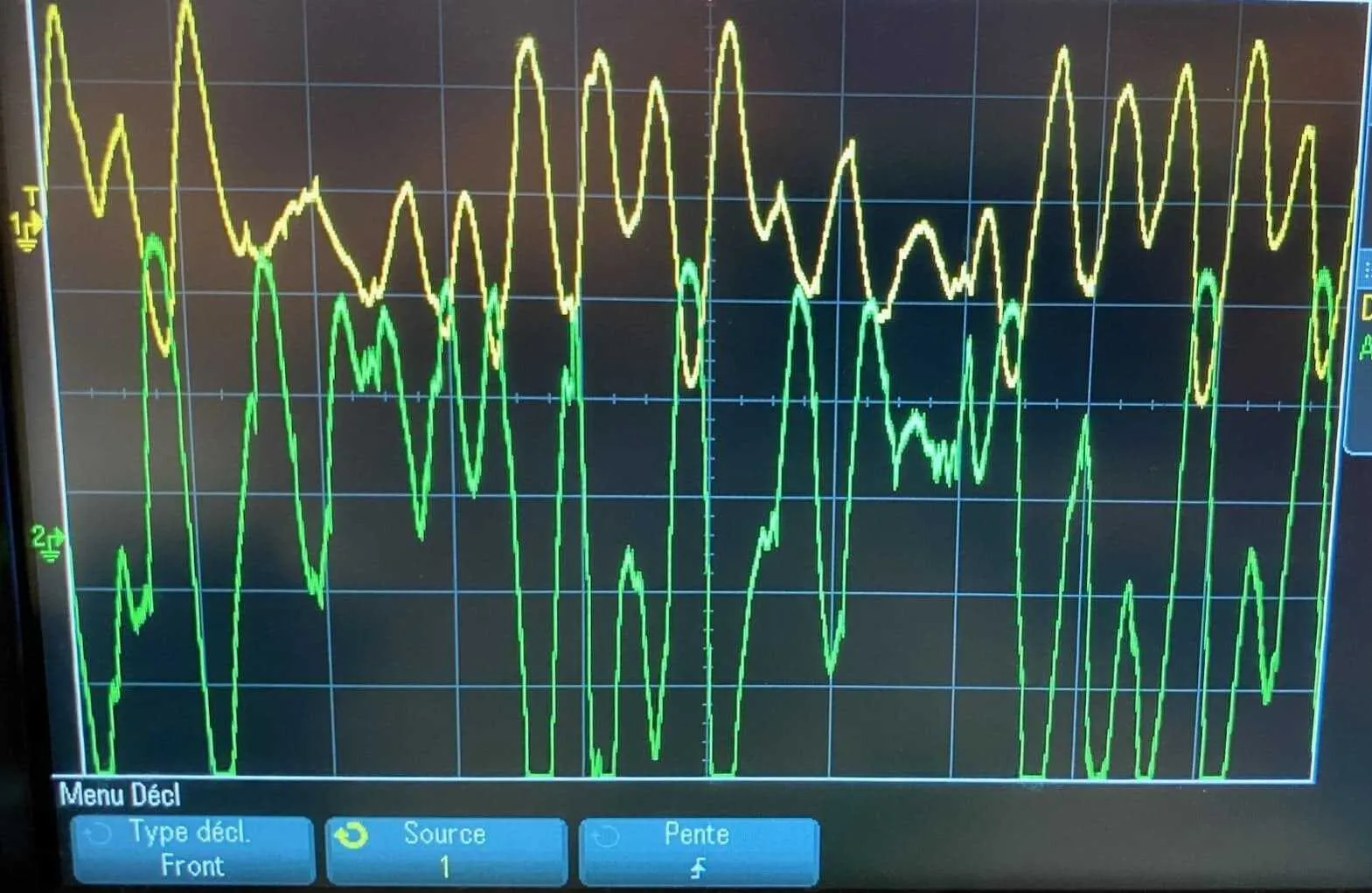
Figure 11 - Résultats associés mesurés
Avec en vert la courbe du signal sans réduction et en jaune celle du signal avec réduction de bruit, nous pouvons voir que l’efficacité est discutable et encore assez peu satisfaisante pour un système réel. Cela nous amène alors à changer la manière dont on traite le signal et donc amener un traitement électronique pour notre système final.
3. Système Électronique
a) Utilisation d’une plaque Sysam
Pour explorer cette nouvelle possibilité, nous avons développé un programme de traitement du signal en python afin d’enregistrer un son, de le traiter avec notre programme grâce à la plaque Sysam puis le renvoyer dans un autre haut-parleur. Expérimentalement, nous avons commencé par un signal sinusoïdal que nous avons déphasé afin de pouvoir évaluer clairement l’efficacité de notre solution.
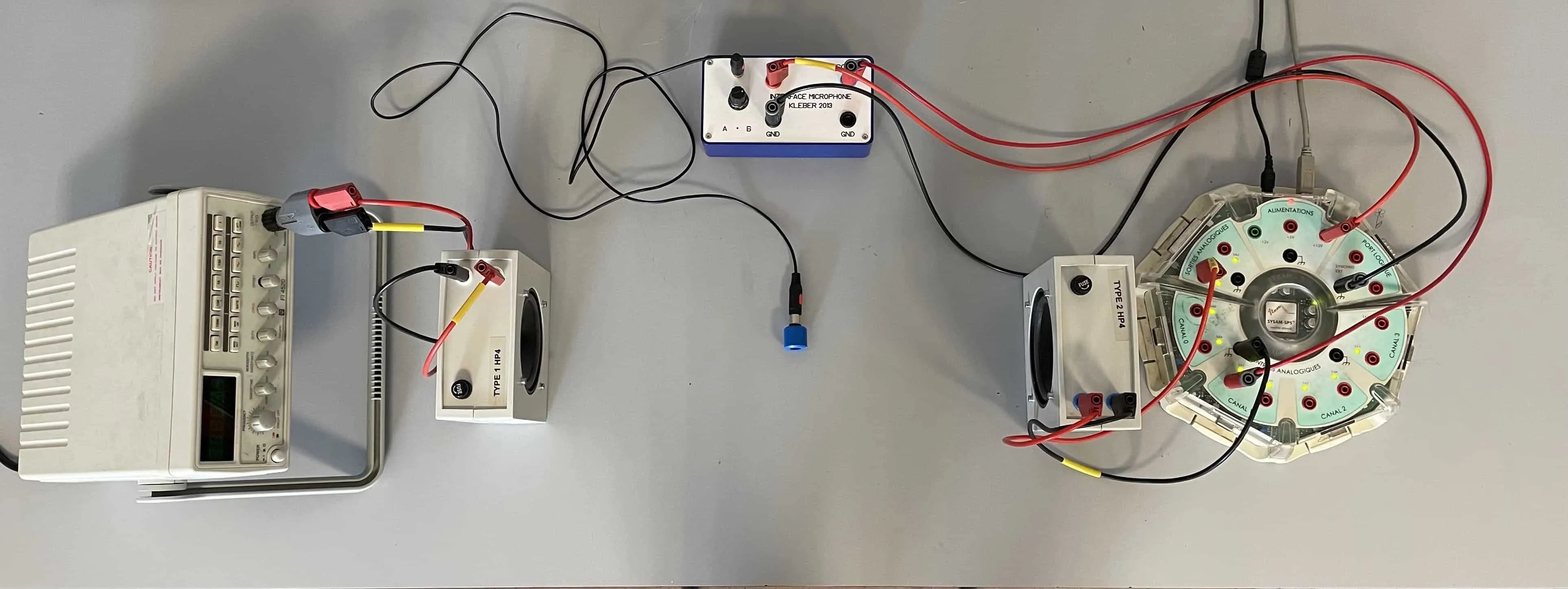
Figure 12 - Premier système électronique avec Plaque Sysam
Cependant, l’expérience nous a montré que, pour un travail aussi précis que la réduction de bruit active, la plaque Sysam était loin d’être assez rapide pour traiter le signal. Les résultats assez mauvais que nous avons obtenus nous ont donc mené à considérer une option plus aboutie comprenant un Raspberry Pi pour le traitement du signal.
b) Implémentation numérique avec un Raspberry Pi
Pour automatiser l’analyse et la correction du signal sonore, un système numérique a été développé à l’aide d’un Raspberry Pi et de convertisseurs analogique-numérique (CAN) et numérique-analogique (CNA). Cela ajoute alors des contraintes supplémentaires sur le signal d’entrée et de sortie, car il doit correspondre aux amplitudes et plages de tension requises par les composants de traitement.
Le protocole mis en place comprend alors plusieurs étapes :
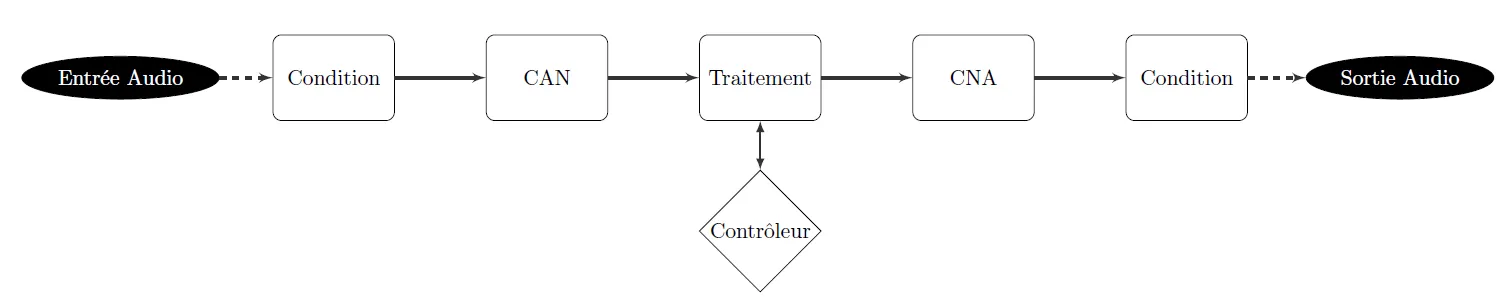
Figure 13 - Protocole de traitement du signal
Pour le conditionnement du signal d’entrée, il a été décidé d’utiliser un amplificateur sommateur afin de décaler la plage de tension au-dessus de avec une amplitude de .
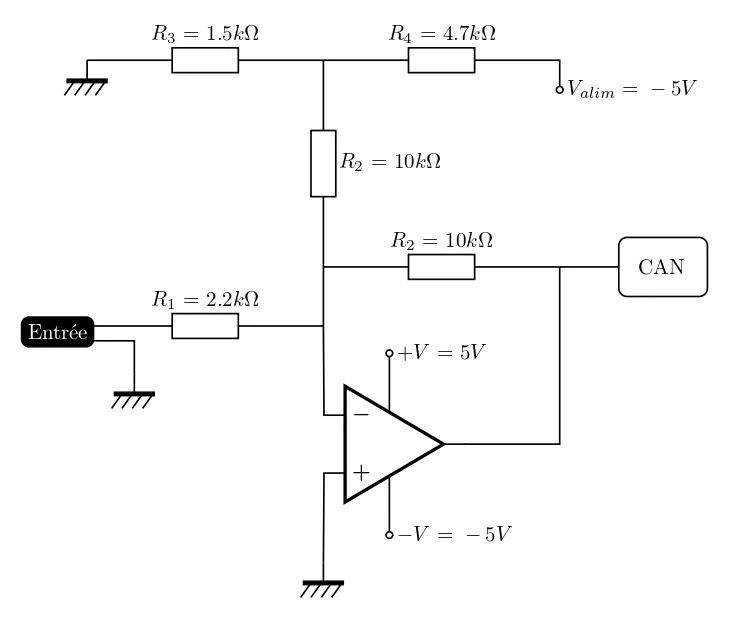
Figure 14 - Amplificateur sommateur pour le conditionnement d’entrée
Pour le signal de sortie, nous avons pu observer que le faible taux d’échantillonnage du Raspberry Pi était à l’origine d’arêtes vives en sortie. Nous avons donc choisi d’utiliser un filtre passe-bas pour y remédier.
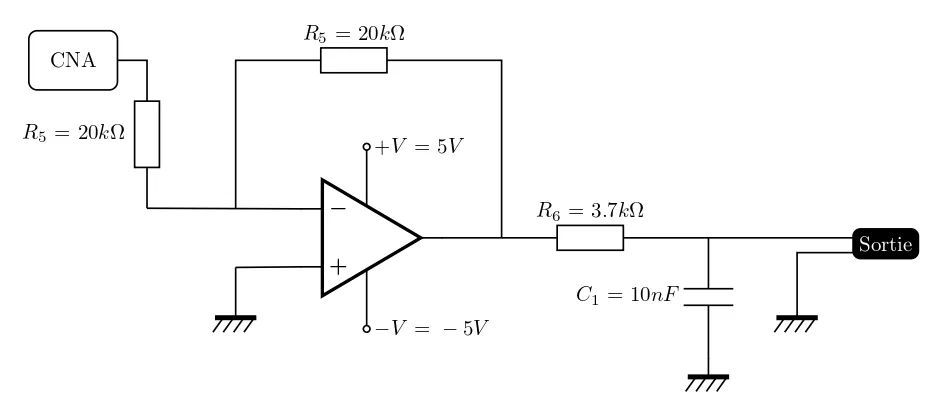
Figure 15 - Passe-bas pour le conditionnement de sortie
Un système d’interface utilisateur a aussi été conçu afin de pouvoir ajuster dynamiquement les paramètres du système :
- Un encodeur rotatif permet de modifier l’intensité de la réduction du bruit
- Des LED indiquent l’état de fonctionnement du système
- Un script en Python gère l’ensemble du traitement des périphériques et l’optimisation du signal sonore
Finalement, nous avons pu modéliser le circuit final et le réaliser :
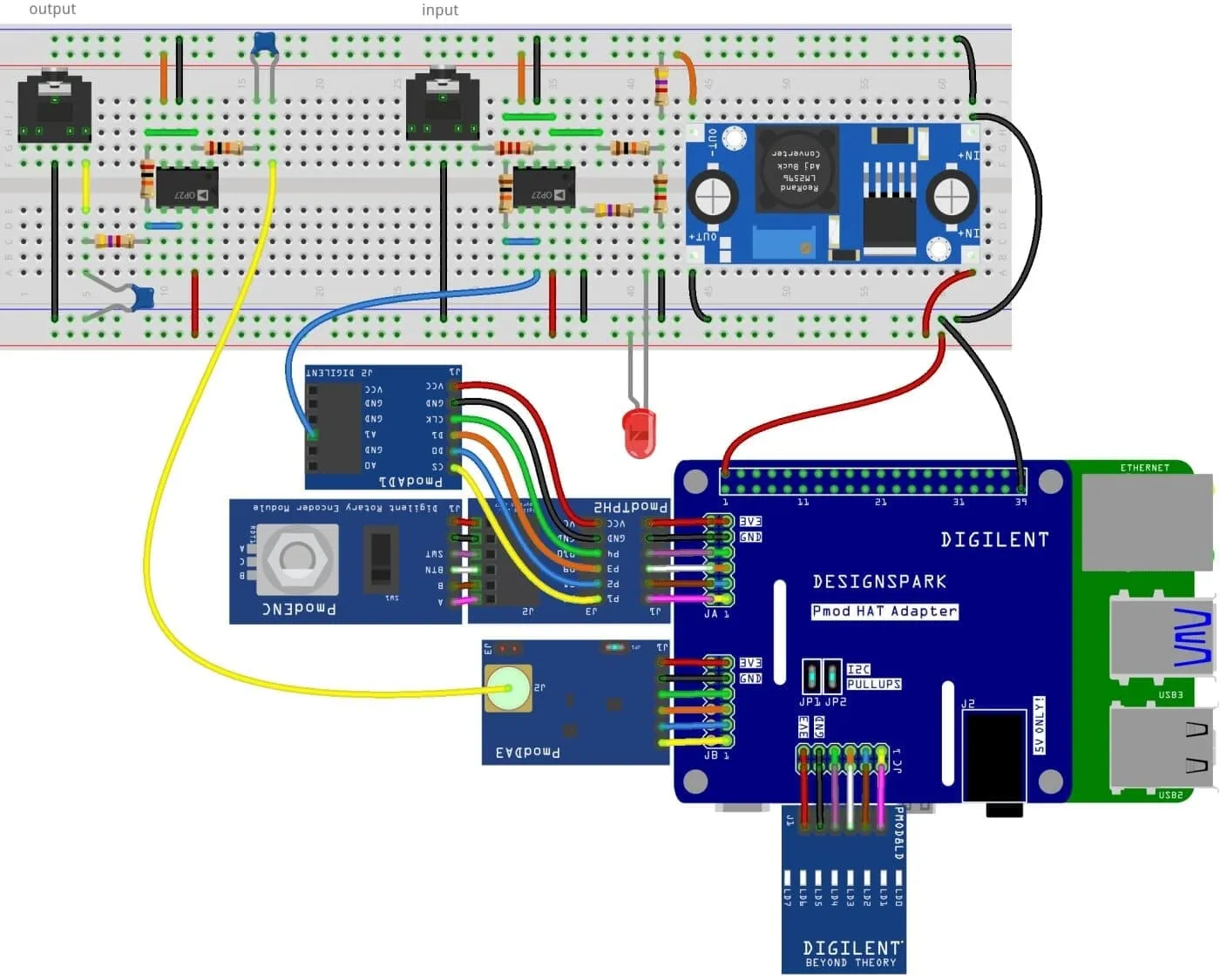
Figure 16 - Modélisation du projet final

Figure 17 - Système en état de marche
Cependant, l’implémentation sur le Raspberry Pi nous a posé plusieurs défis :
- La vitesse de traitement était insuffisante, introduisant un décalage temporel rendant l’annulation inefficace
- Un problème de distorsion sonore a été observé en sortie sans raison évidente
- Certaines broches de sortie du Raspberry Pi ont été endommagées lors des tests, rendant impossible la mise en pratique finale
La mise en pratique n’a donc pas pu être effectuée malgré l’élaboration de toute la partie théorique en amont. Toutefois, au vu des résultats prometteurs des autres expériences, ce système aurait vraisemblablement pu aboutir. Les deux derniers systèmes étant très complexes et chronophages, nous aurions aussi pu explorer d’autres pistes :
- Miniaturisation portable du système intermédiaire
- Trouver un équivalent de la plaque Sysam moins complexe que le Raspberry Pi
Ce projet pourrait vous intéresser
 2024
2024Création d'une radio
Conception et réalisation d'un récepteur FM avec filtrage et démodulation.